
ai.stanford.edu/blog/gti
Preview meta tags from the ai.stanford.edu website.
Linked Hostnames
8- 18 links toai.stanford.edu
- 2 links totwitter.com
- 1 link toarxiv.org
- 1 link tocs.stanford.edu
- 1 link togetpocket.com
- 1 link toweb.stanford.edu
- 1 link towww.facebook.com
- 1 link towww.reddit.com
Thumbnail
Search Engine Appearance
GTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
It takes a lot of data for robots to autonomously learn to perform simple manipulation tasks as as grasping and pushing. For example, prior work12 has leveraged Deep Reinforcement Learning to train robots to grasp and stack various objects. These tasks are usually short and relatively simple - for example, picking up a plastic bottle in a tray. However, because reinforcement learning relies on gaining experiences through trial-and-error, hundreds of robot hours were required for the robot to learn to picking up objects reliably. Quillen, D., Jang, E., Nachum, O., Finn, C., Ibarz, J., & Levine, S. (2018, May). Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6284-6291). IEEE. ↩ Cabi, S., Colmenarejo, S. G., Novikov, A., Konyushkova, K., Reed, S., Jeong, R., … & Sushkov, O. (2019). A Framework for Data-Driven Robotics. arXiv preprint arXiv:1909.12200. ↩
Bing
GTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
It takes a lot of data for robots to autonomously learn to perform simple manipulation tasks as as grasping and pushing. For example, prior work12 has leveraged Deep Reinforcement Learning to train robots to grasp and stack various objects. These tasks are usually short and relatively simple - for example, picking up a plastic bottle in a tray. However, because reinforcement learning relies on gaining experiences through trial-and-error, hundreds of robot hours were required for the robot to learn to picking up objects reliably. Quillen, D., Jang, E., Nachum, O., Finn, C., Ibarz, J., & Levine, S. (2018, May). Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6284-6291). IEEE. ↩ Cabi, S., Colmenarejo, S. G., Novikov, A., Konyushkova, K., Reed, S., Jeong, R., … & Sushkov, O. (2019). A Framework for Data-Driven Robotics. arXiv preprint arXiv:1909.12200. ↩
DuckDuckGo
https://ai.stanford.edu/blog/gtiGTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
It takes a lot of data for robots to autonomously learn to perform simple manipulation tasks as as grasping and pushing. For example, prior work12 has leveraged Deep Reinforcement Learning to train robots to grasp and stack various objects. These tasks are usually short and relatively simple - for example, picking up a plastic bottle in a tray. However, because reinforcement learning relies on gaining experiences through trial-and-error, hundreds of robot hours were required for the robot to learn to picking up objects reliably. Quillen, D., Jang, E., Nachum, O., Finn, C., Ibarz, J., & Levine, S. (2018, May). Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6284-6291). IEEE. ↩ Cabi, S., Colmenarejo, S. G., Novikov, A., Konyushkova, K., Reed, S., Jeong, R., … & Sushkov, O. (2019). A Framework for Data-Driven Robotics. arXiv preprint arXiv:1909.12200. ↩
General Meta Tags
11- titleGTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations | SAIL Blog
- titleGTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations | The Stanford AI Lab Blog
- charsetutf-8
- viewportwidth=device-width, initial-scale=1, maximum-scale=1
- generatorJekyll v3.9.0
Open Graph Meta Tags
6- og:titleGTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
 og:localeen_US
og:localeen_US- og:descriptionIt takes a lot of data for robots to autonomously learn to perform simple manipulation tasks as as grasping and pushing. For example, prior work12 has leveraged Deep Reinforcement Learning to train robots to grasp and stack various objects. These tasks are usually short and relatively simple - for example, picking up a plastic bottle in a tray. However, because reinforcement learning relies on gaining experiences through trial-and-error, hundreds of robot hours were required for the robot to learn to picking up objects reliably. Quillen, D., Jang, E., Nachum, O., Finn, C., Ibarz, J., & Levine, S. (2018, May). Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods. In 2018 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6284-6291). IEEE. ↩ Cabi, S., Colmenarejo, S. G., Novikov, A., Konyushkova, K., Reed, S., Jeong, R., … & Sushkov, O. (2019). A Framework for Data-Driven Robotics. arXiv preprint arXiv:1909.12200. ↩
- og:urlhttp://ai.stanford.edu/blog/gti/
- og:site_nameSAIL Blog
Twitter Meta Tags
6- twitter:cardsummary
- twitter:titleGTI: Learning to Generalize Across Long-Horizon Tasks from Human Demonstrations
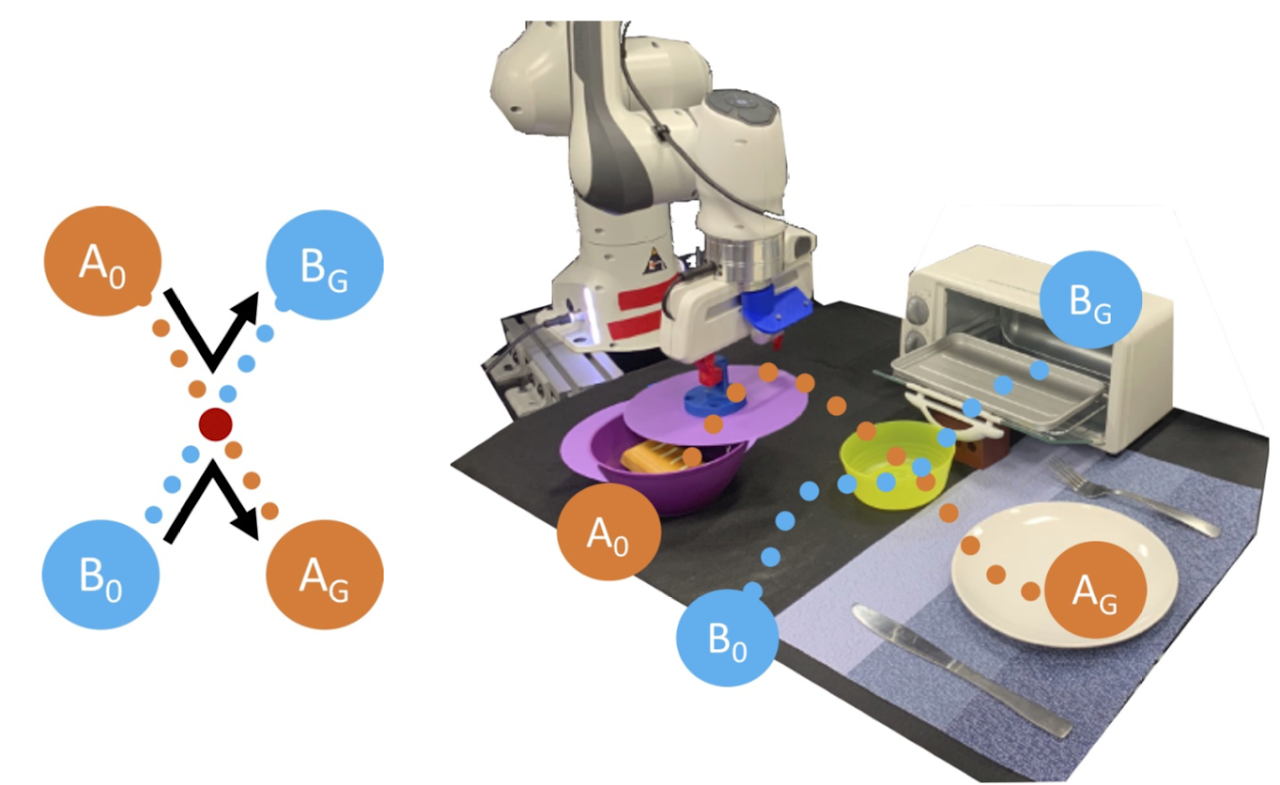
- twitter:descriptionWe developed Generalization Through Imitation (GTI) - an algorithm for learning visuomotor control from human demonstrations and generalizing to new long-horizon tasks by leveraging latent compositional structures.
- twitter:creator@StanfordAILab
- twitter:cardsummary_large_image
Link Tags
12- alternatehttp://ai.stanford.edu/blog/feed.xml
- canonicalhttp://ai.stanford.edu/blog/gti/
- canonicalhttp://ai.stanford.edu/blog/gti/
- icon/blog/assets/img/favicon-32x32.png
- icon/blog/assets/img/favicon-16x16.png
Emails
1- ?subject=GTI%3A+Learning+to+Generalize+Across+Long-Horizon+Tasks+from+Human+Demonstrations%20%7C%20SAIL+Blog&body=:%20http://ai.stanford.edu/blog/gti/
Links
26- http://ai.stanford.edu
- http://ai.stanford.edu/blog/feed.xml
- http://web.stanford.edu/~amandlek
- http://www.reddit.com/submit?url=http://ai.stanford.edu/blog/gti/&title=GTI%3A+Learning+to+Generalize+Across+Long-Horizon+Tasks+from+Human+Demonstrations%20%7C%20SAIL+Blog
- https://ai.stanford.edu/blog