
ai.stanford.edu/blog/ntp-ntg
Preview meta tags from the ai.stanford.edu website.
Linked Hostnames
7- 17 links toai.stanford.edu
- 4 links toarxiv.org
- 2 links totwitter.com
- 1 link tocs.stanford.edu
- 1 link togetpocket.com
- 1 link towww.facebook.com
- 1 link towww.reddit.com
Thumbnail
Search Engine Appearance
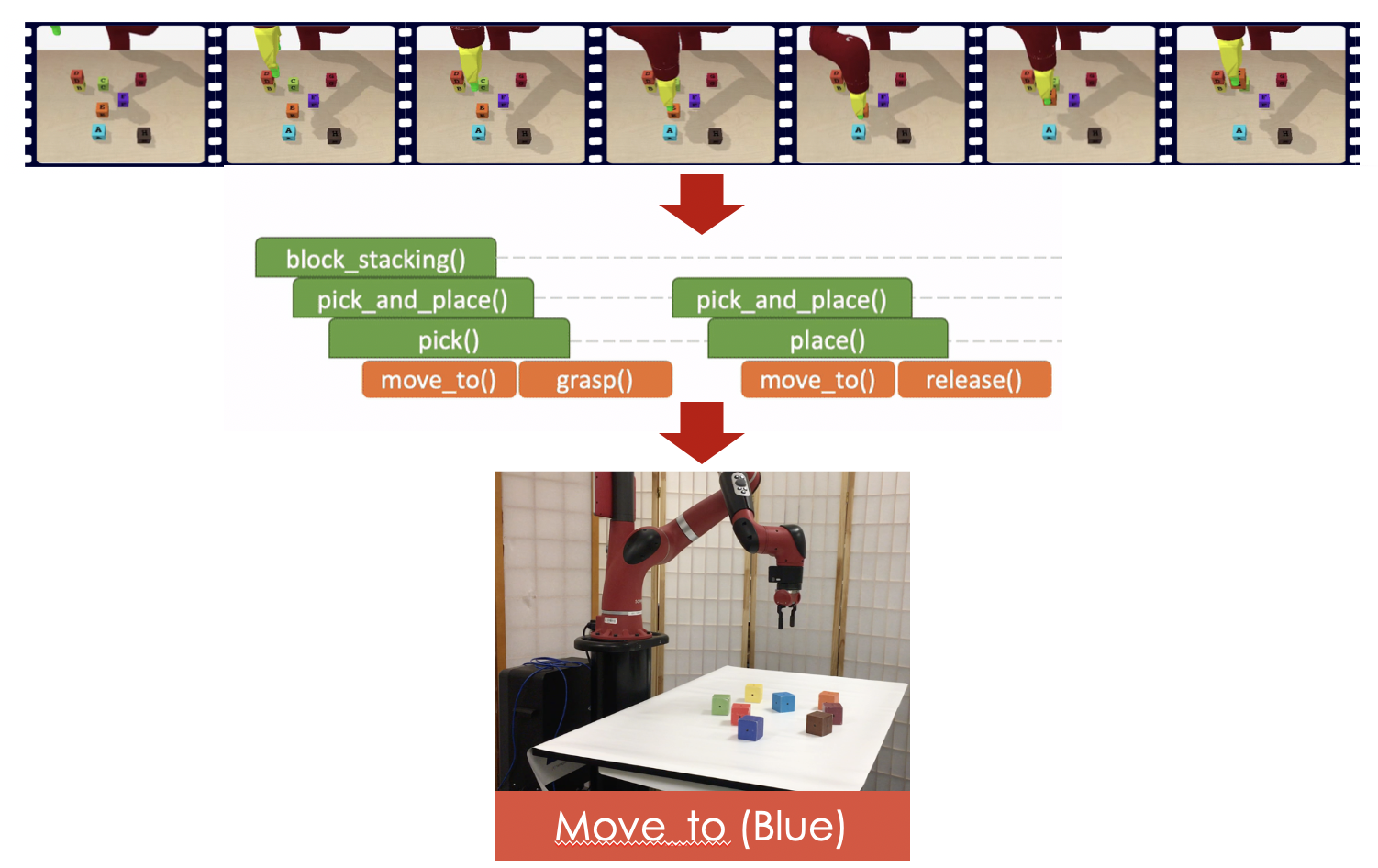
Leveraging Compositionality for One-Shot Imitation Learning
How do you teach a robot to pack your groceries into different boxes? While modern industrial robots are incredibly capable and precise, they require tremendous expertise to program and are designed to execute the exact same motion millions of times. Trying to program a robot to be able to pick up any kind of groceries, each with different characteristics, geometries, and weight, and pack them in the right boxes, would be incredibly difficult.
Bing
Leveraging Compositionality for One-Shot Imitation Learning
How do you teach a robot to pack your groceries into different boxes? While modern industrial robots are incredibly capable and precise, they require tremendous expertise to program and are designed to execute the exact same motion millions of times. Trying to program a robot to be able to pick up any kind of groceries, each with different characteristics, geometries, and weight, and pack them in the right boxes, would be incredibly difficult.
DuckDuckGo
https://ai.stanford.edu/blog/ntp-ntgLeveraging Compositionality for One-Shot Imitation Learning
How do you teach a robot to pack your groceries into different boxes? While modern industrial robots are incredibly capable and precise, they require tremendous expertise to program and are designed to execute the exact same motion millions of times. Trying to program a robot to be able to pick up any kind of groceries, each with different characteristics, geometries, and weight, and pack them in the right boxes, would be incredibly difficult.
General Meta Tags
11- titleLeveraging Compositionality for One-Shot Imitation Learning | SAIL Blog
- titleLeveraging Compositionality for One-Shot Imitation Learning | The Stanford AI Lab Blog
- charsetutf-8
- viewportwidth=device-width, initial-scale=1, maximum-scale=1
- generatorJekyll v3.9.0
Open Graph Meta Tags
6- og:titleLeveraging Compositionality for One-Shot Imitation Learning
 og:localeen_US
og:localeen_US- og:descriptionHow do you teach a robot to pack your groceries into different boxes? While modern industrial robots are incredibly capable and precise, they require tremendous expertise to program and are designed to execute the exact same motion millions of times. Trying to program a robot to be able to pick up any kind of groceries, each with different characteristics, geometries, and weight, and pack them in the right boxes, would be incredibly difficult.
- og:urlhttp://ai.stanford.edu/blog/ntp-ntg/
- og:site_nameSAIL Blog
Twitter Meta Tags
6- twitter:cardsummary
- twitter:titleLeveraging Compositionality for One-Shot Imitation Learning
- twitter:descriptionWe introduce a class of algorithms that solve long-horizon one-shot imitation learning by leveraging compositional priors.
- twitter:creator@StanfordAILab
- twitter:cardsummary_large_image
Link Tags
12- alternatehttp://ai.stanford.edu/blog/feed.xml
- canonicalhttp://ai.stanford.edu/blog/ntp-ntg/
- canonicalhttp://ai.stanford.edu/blog/ntp-ntg/
- icon/blog/assets/img/favicon-32x32.png
- icon/blog/assets/img/favicon-16x16.png
Emails
1- ?subject=Leveraging+Compositionality+for+One-Shot+Imitation+Learning%20%7C%20SAIL+Blog&body=:%20http://ai.stanford.edu/blog/ntp-ntg/
Links
27- http://ai.stanford.edu
- http://ai.stanford.edu/blog/feed.xml
- http://ai.stanford.edu/~dahuang
- http://www.reddit.com/submit?url=http://ai.stanford.edu/blog/ntp-ntg/&title=Leveraging+Compositionality+for+One-Shot+Imitation+Learning%20%7C%20SAIL+Blog
- https://ai.stanford.edu/blog