
blog.me.upenn.edu/a-centimeter-scale-quadruped-leverages-curved-crease-origami
Preview meta tags from the blog.me.upenn.edu website.
Linked Hostnames
11- 11 links toblog.me.upenn.edu
- 3 links towww.grasp.upenn.edu
- 1 link toblog.seas.upenn.edu
- 1 link todirectory.seas.upenn.edu
- 1 link toieee-iros.org
- 1 link totwitter.com
- 1 link towordpress.org
- 1 link towww.facebook.com
Thumbnail
Search Engine Appearance
A Centimeter-Scale Quadruped Leverages Curved-Crease Origami
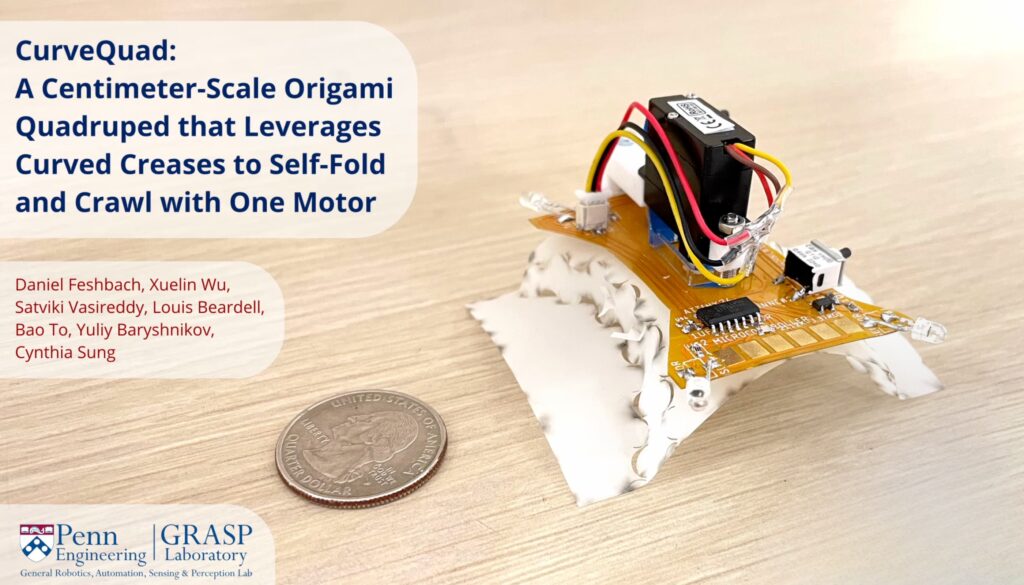
Centimeter-scale walking and crawling robots are in demand both for their ability to explore tight or cluttered environments and for their low fabrication costs. Now, pulling from origami-inspired construction, researchers led by Cynthia Sung, Gabel Family Term Assistant Professor in Mechanical Engineering and Applied Mechanics (MEAM), have crafted a more simplified approach to the design and fabrication of these robots. Known as CurveQuad, this centimeter-scale quadruped leverages curved-crease origami to self-fold, unfold, crawl and steer, all using a single motor. The curved creases in this technique have interesting mechanical properties as compared to more commonly used straight crease designs because they induce bending in a folded sheet. Energy, stored in the folding of creases and in the bending of panels, allows for controlled, reversible and complex motions using fewer actuators. “The robot is able to do these things because it uses curved creases,” says Sung, also a member of Penn’s General Robotics, Automation, Sensing and Perception (GRASP) Lab. “Since it is simple and thus relatively cheap, we imagine that similar designs can be made in the future for rapid deployment of robotic swarms, which could be produced for dollars or potentially even cents per robot.” The findings are published in the journal Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Researchers presented their work on October 2 at the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), held in Detroit, MI. CurveQuad’s single motor for self-folding and movement reduces the robot’s total mass and volume. The origami-inspired design also simplifies the manufacturing and assembly of a centimeter-scale robot by fabricating the entire robot, or its parts, from a few flat sheets of material, then folding it into its 3D shape, often with fully embedded electronics, actuators and computation onboard. These manufacturing processes are also scalable to large-volume production. CurveQuad is a new addition to the sparsely populated design space of steerable, single-actuator walking robots. At just eight centimeters long and weighing approximately 11 grams, it is relatively small and light for a motor-based walking robot, says Daniel Feshbach, lead author and a doctoral student in the Sung Robotics Lab. This article was written by Penn Engineering Today. Click here to read the full article.
Bing
A Centimeter-Scale Quadruped Leverages Curved-Crease Origami
Centimeter-scale walking and crawling robots are in demand both for their ability to explore tight or cluttered environments and for their low fabrication costs. Now, pulling from origami-inspired construction, researchers led by Cynthia Sung, Gabel Family Term Assistant Professor in Mechanical Engineering and Applied Mechanics (MEAM), have crafted a more simplified approach to the design and fabrication of these robots. Known as CurveQuad, this centimeter-scale quadruped leverages curved-crease origami to self-fold, unfold, crawl and steer, all using a single motor. The curved creases in this technique have interesting mechanical properties as compared to more commonly used straight crease designs because they induce bending in a folded sheet. Energy, stored in the folding of creases and in the bending of panels, allows for controlled, reversible and complex motions using fewer actuators. “The robot is able to do these things because it uses curved creases,” says Sung, also a member of Penn’s General Robotics, Automation, Sensing and Perception (GRASP) Lab. “Since it is simple and thus relatively cheap, we imagine that similar designs can be made in the future for rapid deployment of robotic swarms, which could be produced for dollars or potentially even cents per robot.” The findings are published in the journal Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Researchers presented their work on October 2 at the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), held in Detroit, MI. CurveQuad’s single motor for self-folding and movement reduces the robot’s total mass and volume. The origami-inspired design also simplifies the manufacturing and assembly of a centimeter-scale robot by fabricating the entire robot, or its parts, from a few flat sheets of material, then folding it into its 3D shape, often with fully embedded electronics, actuators and computation onboard. These manufacturing processes are also scalable to large-volume production. CurveQuad is a new addition to the sparsely populated design space of steerable, single-actuator walking robots. At just eight centimeters long and weighing approximately 11 grams, it is relatively small and light for a motor-based walking robot, says Daniel Feshbach, lead author and a doctoral student in the Sung Robotics Lab. This article was written by Penn Engineering Today. Click here to read the full article.
DuckDuckGo
https://blog.me.upenn.edu/a-centimeter-scale-quadruped-leverages-curved-crease-origamiA Centimeter-Scale Quadruped Leverages Curved-Crease Origami
Centimeter-scale walking and crawling robots are in demand both for their ability to explore tight or cluttered environments and for their low fabrication costs. Now, pulling from origami-inspired construction, researchers led by Cynthia Sung, Gabel Family Term Assistant Professor in Mechanical Engineering and Applied Mechanics (MEAM), have crafted a more simplified approach to the design and fabrication of these robots. Known as CurveQuad, this centimeter-scale quadruped leverages curved-crease origami to self-fold, unfold, crawl and steer, all using a single motor. The curved creases in this technique have interesting mechanical properties as compared to more commonly used straight crease designs because they induce bending in a folded sheet. Energy, stored in the folding of creases and in the bending of panels, allows for controlled, reversible and complex motions using fewer actuators. “The robot is able to do these things because it uses curved creases,” says Sung, also a member of Penn’s General Robotics, Automation, Sensing and Perception (GRASP) Lab. “Since it is simple and thus relatively cheap, we imagine that similar designs can be made in the future for rapid deployment of robotic swarms, which could be produced for dollars or potentially even cents per robot.” The findings are published in the journal Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Researchers presented their work on October 2 at the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), held in Detroit, MI. CurveQuad’s single motor for self-folding and movement reduces the robot’s total mass and volume. The origami-inspired design also simplifies the manufacturing and assembly of a centimeter-scale robot by fabricating the entire robot, or its parts, from a few flat sheets of material, then folding it into its 3D shape, often with fully embedded electronics, actuators and computation onboard. These manufacturing processes are also scalable to large-volume production. CurveQuad is a new addition to the sparsely populated design space of steerable, single-actuator walking robots. At just eight centimeters long and weighing approximately 11 grams, it is relatively small and light for a motor-based walking robot, says Daniel Feshbach, lead author and a doctoral student in the Sung Robotics Lab. This article was written by Penn Engineering Today. Click here to read the full article.
General Meta Tags
10- titleA Centimeter-Scale Quadruped Leverages Curved-Crease Origami – MEAM Blog @ Penn Engineering
- charsetUTF-8
- viewportwidth=device-width, initial-scale=1
- robotsmax-image-preview:large
- generatorWordPress 6.8.2
Open Graph Meta Tags
10 og:localeen_US
og:localeen_US- og:site_nameMEAM Blog @ Penn Engineering
- og:titleA Centimeter-Scale Quadruped Leverages Curved-Crease Origami
- og:urlhttps://blog.me.upenn.edu/a-centimeter-scale-quadruped-leverages-curved-crease-origami/
- og:typearticle
Twitter Meta Tags
3- twitter:titleA Centimeter-Scale Quadruped Leverages Curved-Crease Origami
- twitter:imagehttps://blog.me.upenn.edu/wp-content/uploads/2024/02/Sung-Robot-Pic-1024x585-2.jpg
- twitter:cardsummary
Link Tags
24- EditURIhttps://blog.me.upenn.edu/xmlrpc.php?rsd
- alternatehttps://blog.me.upenn.edu/feed/
- alternatehttps://blog.me.upenn.edu/wp-json/wp/v2/posts/233
- alternatehttps://blog.me.upenn.edu/wp-json/oembed/1.0/embed?url=https%3A%2F%2Fblog.me.upenn.edu%2Fa-centimeter-scale-quadruped-leverages-curved-crease-origami%2F
- alternatehttps://blog.me.upenn.edu/wp-json/oembed/1.0/embed?url=https%3A%2F%2Fblog.me.upenn.edu%2Fa-centimeter-scale-quadruped-leverages-curved-crease-origami%2F&format=xml
Links
23- https://blog.me.upenn.edu
- https://blog.me.upenn.edu/a-centimeter-scale-quadruped-leverages-curved-crease-origami
- https://blog.me.upenn.edu/author/sibleyc
- https://blog.me.upenn.edu/category/faculty
- https://blog.me.upenn.edu/category/faculty/events